Notícia
Pele artificial sensível ao toque para aplicações robóticas: novos avanços
Pesquisadores dos Estados Unidos, Reino Unido e Itália lideram estudos que podem levar os sistemas robóticos a um próximo nível tecnológico
Warning: foreach() argument must be of type array|object, null given in /home/u393669806/domains/t4h.com.br/public_html/wp-content/plugins/k-elements/functions/after-setup-theme.php on line 55
Instituto de Tecnologia da Califórnia (Caltech)
Fonte
Caltech, Universidade de Glasgow e Universidade de Roma Sapienza
Data
quinta-feira, 9 junho 2022 12:30
Áreas
Bioeletrônica. Biomecânica. Design de Interação. Engenharia Biomédica. Impressão 3D. Inteligência Artificial. Robótica.
Recentemente e simultaneamente, pesquisadores dos Estados Unidos, Reino Unido e Itália publicaram novos avanços de pesquisas envolvendo peles artificiais com sensibilidade ao toque e suas aplicações em sistemas robóticos interativos com humanos. As novas tecnologias podem levar a um novo patamar nas aplicações de robótica nas áreas da saúde, indústria e sociedade.
A pele artificial do Caltech
Uma nova pele artificial desenvolvida no Instituto de Tecnologia da Califórnia (Caltech), nos Estados Unidos, pode dar aos robôs a capacidade de sentir temperatura, pressão e até produtos químicos tóxicos por meio de um simples toque.
Essa nova tecnologia de pele faz parte de uma plataforma robótica que integra a pele artificial com um braço robótico e sensores que se conectam à pele humana. Um sistema de aprendizado de máquina que interage com os dois permite que o usuário humano controle o robô com seus próprios movimentos enquanto recebe feedback por meio de sua própria pele. A plataforma de detecção robótica multimodal, chamada de M-Bot, foi desenvolvida no laboratório do Dr. Wei Gao, professor de Engenharia Médica do Caltech e pesquisador do Heritage Medical Research Institute. O objetivo é dar aos humanos um controle mais preciso sobre os robôs, além de proteger os humanos de possíveis perigos.
“Os robôs modernos estão desempenhando um papel cada vez mais importante na segurança, agricultura e manufatura. Podemos dar a esses robôs uma sensação de toque e temperatura? Também podemos fazê-los sentir produtos químicos como explosivos e agentes nervosos ou riscos biológicos como bactérias e vírus infecciosos? Estamos trabalhando nisso”, disse o professor Wei Gao.
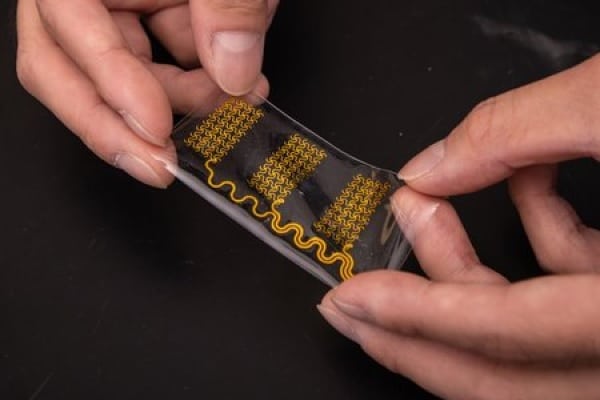
Uma comparação lado a lado de uma mão humana e uma mão robótica revela diferenças muito grandes. Enquanto os dedos humanos são macios, os dedos robóticos tendem a ser rígidos, metálicos, plásticos ou emborrachados. A pele para impressão desenvolvida no laboratório do Dr. Gao é um hidrogel gelatinoso que torna as pontas dos dedos do robô muito mais parecidas com as humanas.
Embutidos nesse hidrogel estão os sensores que dão à pele artificial a capacidade de detectar o mundo ao seu redor. Esses sensores são literalmente impressos na pele da mesma forma que uma impressora jato de tinta imprime texto em uma folha de papel. “A impressão a jato de tinta tem esse cartucho que ejeta gotículas, e essas gotículas são uma solução de tinta, mas podem ser uma solução que desenvolvemos em vez da tinta comum. Desenvolvemos uma variedade de tintas feitas de nanomateriais”, destacou o professor Wei Gao.
Depois de imprimir uma estrutura de fios de nanopartículas de prata, os pesquisadores podem imprimir camadas de sensores em escala micrométrica que podem ser projetados para detectar uma variedade de coisas. O fato de os sensores serem impressos torna mais rápido e fácil para o laboratório projetar e testar novos tipos de sensores. “Quando queremos detectar um determinado composto, garantimos que o sensor tenha uma alta resposta eletroquímica a esse composto. Grafeno impregnado com platina detecta o explosivo TNT de forma muito rápida e seletiva. Para um vírus, estamos imprimindo nanotubos de carbono, que têm uma área de superfície muito alta, e anexando anticorpos para o vírus a eles. Tudo isso pode ser produzido em massa e escalável”, explicou o pesquisador.
A equipe do professor Gao acoplou a pele artificial a um sistema interativo que permite que um usuário humano controle o robô por meio de seus próprios movimentos musculares, ao mesmo tempo em que recebe feedback da própria pele a partir da pele do robô.
Esta parte do sistema faz uso de peças impressas adicionais – neste caso, eletrodos presos ao antebraço do operador humano. Os eletrodos são semelhantes aos usados para medir as ondas cerebrais, mas são posicionados para detectar os sinais elétricos gerados pelos músculos do operador à medida que movem a mão e o pulso. Um simples movimento do pulso humano diz ao braço robótico para se mover para cima ou para baixo, e um aperto ou abertura dos dedos humanos provoca uma ação semelhante da mão robótica. “Usamos o aprendizado de máquina para converter esses sinais em gestos para controle robótico. Treinamos o modelo com seis gestos diferentes”, concluiu o professor Wei Gao.
Os resultados foram publicados na revista científica Science Robotics. Acesse o artigo científico completo (em inglês).
Pele artificial em Glasgow
A nova forma de pele eletrônica da equipe da Universidade de Glasgow, no Reino Unido, se inspira em como o sistema nervoso periférico humano interpreta os sinais da pele para eliminar a latência e o consumo de energia. Assim que a pele humana recebe uma entrada, o sistema nervoso periférico começa a processá-la no ponto de contato, reduzindo-a apenas à informação vital antes de ser enviada ao cérebro. Essa redução de dados sensoriais permite o uso eficiente dos canais de comunicação necessários para enviar os dados ao cérebro, que responde quase imediatamente para que o corpo reaja adequadamente.
Para construir uma pele eletrônica capaz de uma resposta computacionalmente eficiente, semelhante a uma sinapse, os pesquisadores imprimiram uma grade de 168 transistores sinápticos feitos de nanofios de óxido de zinco diretamente em uma superfície plástica flexível. Em seguida, eles conectaram o transistor sináptico ao sensor de pele presente na palma de uma mão robótica totalmente articulada em forma humana.
Quando o sensor é tocado, ele registra uma mudança em sua resistência elétrica – uma pequena mudança corresponde a um toque leve e um toque mais forte cria uma mudança maior na resistência. Essa entrada é projetada para imitar a maneira como os neurônios sensoriais funcionam no corpo humano.
Nas gerações anteriores de pele eletrônica, esses dados de entrada seriam enviados a um computador para serem processados. Em vez disso, um circuito embutido na pele atua como uma sinapse artificial, reduzindo a entrada em um simples pico de tensão elétrica cuja frequência varia de acordo com o nível de pressão aplicado à pele, acelerando o processo de reação. A equipe usou a saída variável desse pico de tensão para ensinar à pele respostas apropriadas à dor simulada, o que faria a mão do robô reagir. Ao definir um limite de tensão de entrada para causar uma reação, a equipe poderia fazer a mão do robô recuar de um golpe forte no centro da palma da mão.
Em outras palavras, a pele aprendeu a se afastar de uma fonte de desconforto simulado por meio do processamento de informações que imita o funcionamento do sistema nervoso humano.
O desenvolvimento da pele eletrônica é o mais recente avanço em superfícies impressas flexíveis e elásticas do Grupo Bendable Electronics and Sensing Technologies (BEST) da Universidade de Glasgow, liderado pelo professor Dr. Ravinder Dahiya.
“Todos nós aprendemos cedo em nossas vidas a responder adequadamente a estímulos inesperados, como a dor, para evitar que nos machuquemos novamente. É claro que o desenvolvimento dessa nova forma de pele eletrônica não envolveu realmente infligir dor como a conhecemos – é simplesmente uma maneira abreviada de explicar o processo de aprendizado com estímulos externos. O que conseguimos criar por meio desse processo é uma capa eletrônica capaz de aprendizado distribuído no nível do hardware, que não precisa enviar mensagens para um processador central antes de agir. Em vez disso, [o sistema] acelera bastante o processo de resposta ao toque, reduzindo a quantidade de computação necessária.”, disse o professor Dahiya, da Escola de Engenharia de Glasgow.
“Acreditamos que este é um verdadeiro passo à frente em nosso trabalho para criar uma pele eletrônica neuromórfica impressa em larga escala capaz de responder adequadamente aos estímulos”, concluiu o Dr. Ravinder Dahiya. O Dr. Fengyuan Liu, membro do grupo BEST e coautor do artigo, acrescentou: “No futuro, esta pesquisa pode ser a base para uma pele eletrônica mais avançada que permita robôs capazes de explorar e interagir com o mundo em novas maneiras, ou construir membros protéticos que serão capazes de níveis quase humanos de sensibilidade ao toque”.
Os resultados também foram publicados na revista científica Science Robotics. Acesse o resumo do artigo científico (em inglês).
Pesquisadores da Itália também desenvolvem pele artificial
A Universidade de Roma Sapienza está na equipe de pesquisa que realizou um estudo sobre o funcionamento de uma inovadora pele artificial com sensores em robôs colaborativos que emulam parte da pele humana. A pesquisa, que envolveu o Dr. Eduardo Palermo, do Departamento de Engenharia Mecânica e Aeroespacial da universidade, é coordenada pelo Instituto de BioRobótica da Escola Superior Sant’Anna, em colaboração com o Instituto Italiano de Tecnologia, com a Universidade Campus Bio-Medico de Roma e com a Universidade Ca ‘Foscari de Veneza, além do centro de competência ARTES 4.0.
Graças aos sensores táteis de fibra óptica, capazes de localizar e detectar a intensidade da força de contato em uma extensa área de pele artificial, será possível, com base nesta pesquisa, melhorar a interação dos robôs com as pessoas de uma nova maneira, tornando a máquina capaz de adaptar seu comportamento ao ambiente circundante.
Essa tecnologia faz parte da chamada robótica colaborativa, com diferentes cenários como robótica médica, robótica cirúrgica, robótica para assistência pessoal, e permitirá que os robôs interajam com as pessoas e as auxiliem da forma mais segura nas tarefas diárias. Outro cenário é o da indústria 4.0: o robô pode se tornar um companheiro do trabalhador, permitindo aliviar tarefas e cansaço físico e diminuir a incidência de acidentes de trabalho.
Os resultados foram publicados na revista científica Nature Machine Intelligence. Acesse o artigo científico completo (em inglês).
Acesse a notícia na página do Instituto de Tecnologia da Califórnia (em inglês).
Acesse a notícia na página da Universidade de Glasgow (em inglês).
Acesse a notícia na página da Universidade de Roma Sapienza (em italiano).
Fontes: Emily Velasco (Caltech), Universidade de Glasgow e Universidade de Roma Sapienza. Imagem: sensor se conecta à pele do antebraço de uma pessoa e permite que ela controle um sistema robótico através de seus próprios movimentos musculares. Fonte: Instituto de Tecnologia da Califórnia (Caltech).
Em suas publicações, o Portal Tech4Health da Rede T4H tem o único objetivo de divulgação científica, tecnológica ou de informações comerciais para disseminar conhecimento. Nenhuma publicação do Portal Tech4Health tem o objetivo de aconselhamento, diagnóstico, tratamento médico ou de substituição de qualquer profissional da área da saúde. Consulte sempre um profissional de saúde qualificado para a devida orientação, medicação ou tratamento, que seja compatível com suas necessidades específicas.
Os comentários constituem um espaço importante para a livre manifestação dos usuários, desde que cadastrados no Portal Tech4Health e que respeitem os Termos e Condições de Uso. Portanto, cada comentário é de responsabilidade exclusiva do usuário que o assina, não representando a opinião do Portal Tech4Health, que pode retirar, sem prévio aviso, comentários postados que não estejam de acordo com estas regras.
Leia também
Warning: foreach() argument must be of type array|object, null given in /home/u393669806/domains/t4h.com.br/public_html/wp-content/plugins/k-elements/functions/after-setup-theme.php on line 55
Warning: foreach() argument must be of type array|object, null given in /home/u393669806/domains/t4h.com.br/public_html/wp-content/plugins/k-elements/functions/after-setup-theme.php on line 55

Warning: foreach() argument must be of type array|object, null given in /home/u393669806/domains/t4h.com.br/public_html/wp-content/plugins/k-elements/functions/after-setup-theme.php on line 55
Warning: foreach() argument must be of type array|object, null given in /home/u393669806/domains/t4h.com.br/public_html/wp-content/plugins/k-elements/functions/after-setup-theme.php on line 55
Warning: foreach() argument must be of type array|object, null given in /home/u393669806/domains/t4h.com.br/public_html/wp-content/plugins/k-elements/functions/after-setup-theme.php on line 55
Warning: foreach() argument must be of type array|object, null given in /home/u393669806/domains/t4h.com.br/public_html/wp-content/plugins/k-elements/functions/after-setup-theme.php on line 55
Warning: foreach() argument must be of type array|object, null given in /home/u393669806/domains/t4h.com.br/public_html/wp-content/plugins/k-elements/functions/after-setup-theme.php on line 55
Warning: foreach() argument must be of type array|object, null given in /home/u393669806/domains/t4h.com.br/public_html/wp-content/plugins/k-elements/functions/after-setup-theme.php on line 55

Warning: foreach() argument must be of type array|object, null given in /home/u393669806/domains/t4h.com.br/public_html/wp-content/plugins/k-elements/functions/after-setup-theme.php on line 55
Warning: foreach() argument must be of type array|object, null given in /home/u393669806/domains/t4h.com.br/public_html/wp-content/plugins/k-elements/functions/after-setup-theme.php on line 55
Warning: foreach() argument must be of type array|object, null given in /home/u393669806/domains/t4h.com.br/public_html/wp-content/plugins/k-elements/functions/after-setup-theme.php on line 55
Warning: foreach() argument must be of type array|object, null given in /home/u393669806/domains/t4h.com.br/public_html/wp-content/plugins/k-elements/functions/after-setup-theme.php on line 55

Warning: foreach() argument must be of type array|object, null given in /home/u393669806/domains/t4h.com.br/public_html/wp-content/plugins/k-elements/functions/after-setup-theme.php on line 55
Warning: foreach() argument must be of type array|object, null given in /home/u393669806/domains/t4h.com.br/public_html/wp-content/plugins/k-elements/functions/after-setup-theme.php on line 55

Warning: foreach() argument must be of type array|object, null given in /home/u393669806/domains/t4h.com.br/public_html/wp-content/plugins/k-elements/functions/after-setup-theme.php on line 55
Warning: foreach() argument must be of type array|object, null given in /home/u393669806/domains/t4h.com.br/public_html/wp-content/plugins/k-elements/functions/after-setup-theme.php on line 55

Apenas usuários cadastrados no Portal tech4health t4h podem comentar, Cadastre-se! Por favor, faça Login para comentar