Notícia
Está tudo no pulso: mão robótica desenvolvida em Cambridge aprende a segurar objetos
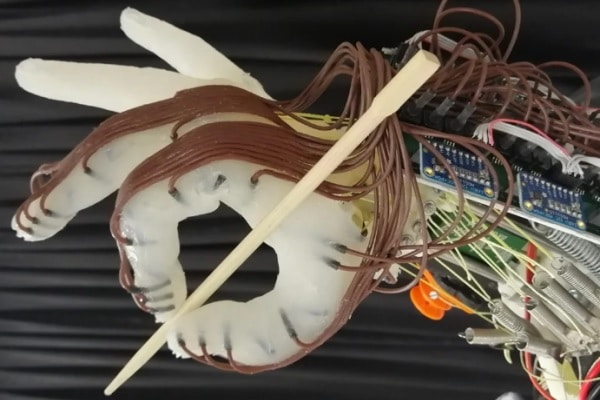
Pesquisadores projetaram mão robótica de baixo custo e eficiente em termos de energia que pode agarrar uma variedade de objetos – e não deixá-los cair – usando apenas o movimento de seu pulso e a sensação em sua ‘pele’
Warning: foreach() argument must be of type array|object, null given in /home/u393669806/domains/t4h.com.br/public_html/wp-content/plugins/k-elements/functions/after-setup-theme.php on line 55
Laboratório de Robótica Bioinspirada, Universidade de Cambridge
Fonte
Universidade de Cambridge
Data
sábado, 15 abril 2023 18:35
Áreas
Bioeletrônica. Biomecânica. Ciência dos Materiais. Engenharia Biomédica. Impressão 3D. Robótica. Sistemas de Controle.
Agarrar objetos de diferentes tamanhos, formas e texturas é um problema fácil para um ser humano, mas desafiador para um robô. Pesquisadores da Universidade de Cambridge, no Reino Unido, projetaram uma mão robótica macia impressa em 3D que pode realizar uma série de movimentos complexos.
A mão do robô foi treinada para agarrar diferentes objetos e foi capaz de prever se os deixaria cair usando as informações fornecidas por sensores colocados em sua ‘pele’.
Esse tipo de movimento passivo torna o robô muito mais fácil de controlar e muito mais eficiente em termos de energia do que os robôs com dedos totalmente motorizados. Os pesquisadores disseram que seu design adaptável pode ser usado no desenvolvimento de robôs de baixo custo que são capazes de movimentos mais naturais e podem aprender a agarrar uma ampla gama de objetos. Os resultados foram publicados na revista científica Advanced Intelligent Systems.
No mundo natural, o movimento resulta da interação entre o cérebro e o corpo: isso permite que pessoas e animais se movam de maneiras complexas sem gastar quantidades desnecessárias de energia. Nos últimos anos, os componentes flexíveis começaram a ser integrados ao design robótico graças aos avanços nas técnicas de impressão 3D, que permitiram aos pesquisadores adicionar complexidade a sistemas simples e eficientes em termos de energia.
A mão humana é altamente complexa e recriar toda a sua destreza e adaptabilidade em um robô é um enorme desafio de pesquisa. A maioria dos robôs avançados de hoje não é capaz de realizar tarefas de manipulação que crianças pequenas podem realizar com facilidade. Por exemplo, os humanos sabem instintivamente quanta força usar ao pegar um ovo, mas para um robô, isso é um desafio: força demais e o ovo pode quebrar; muito pouco, e o robô pode deixá-lo cair. Além disso, uma mão robótica totalmente acionada com motores para cada articulação em cada dedo, requer uma quantidade significativa de energia.
No laboratório de robótica bioinspirada do professor Dr. Fumiya Iida, no Departamento de Engenharia de Cambridge, os pesquisadores desenvolveram possíveis soluções para ambos os problemas: uma mão robótica que pode agarrar uma variedade de objetos com a quantidade correta de pressão usando uma quantidade mínima de energia.
Assista ao vídeo de apresentação da mão robótica (em inglês):
(Fonte: Universidade de Cambridge)
“Em experimentos anteriores, nosso laboratório mostrou que é possível obter uma amplitude de movimento significativa em uma mão robótica apenas movendo o pulso”, disse o Dr. Thomas George-Thuruthel, coautor do estudo e que atualmente trabalha na University College London (UCL). “Queríamos ver se uma mão robótica baseada em movimento passivo poderia não apenas agarrar objetos, mas seria capaz de prever se iria soltar os objetos ou não, e se adaptar de acordo”.
Os pesquisadores usaram uma mão antropomórfica impressa em 3D implantada com sensores táteis, para que a mão pudesse sentir o que estava tocando. A mão só era capaz de movimentos passivos baseados no pulso.
A equipe realizou mais de 1.200 testes com a mão do robô, observando sua capacidade de agarrar pequenos objetos sem deixá-los cair. O robô foi inicialmente treinado usando pequenas bolas de plástico impressas em 3D e as agarrou usando uma ação pré-definida obtida por meio de demonstrações humanas.
“Esse tipo de mão tem um pouco de elasticidade: ela pode pegar coisas sozinha sem qualquer ação dos dedos”, disse o Dr. Kieran Gilday, primeiro autor do estudo e que agora trabalha na Escola Politécnica Federal de Lausanne (EPFL), na Suíça. “Os sensores táteis dão ao robô uma noção de quão bem a aderência está indo, então ele sabe quando está começando a escorregar. Isso ajuda a prever quando as coisas vão falhar.”
O robô usou tentativa e erro para aprender que tipo de pegada seria bem-sucedida. Depois de terminar o treinamento com as bolas, ele tentou agarrar diferentes objetos, incluindo um pêssego, um mouse de computador e um rolo de plástico-bolha. Nesses testes, a mão conseguiu agarrar com sucesso 11 dos 14 objetos.
“Os sensores, que são como a pele do robô, medem a pressão aplicada ao objeto”, disse o Dr. George-Thuruthel. “Não podemos dizer exatamente quais informações o robô está obtendo, mas teoricamente pode estimar onde o objeto foi agarrado e com quanta força.”
“O robô aprende que uma combinação de um movimento específico e um conjunto específico de dados do sensor levará à falha, o que o torna uma solução personalizável. A mão é muito simples, mas consegue pegar muitos objetos com a mesma estratégia”, destacou o Dr. Kieran Gilday.
“A grande vantagem desse projeto é a amplitude de movimento que podemos obter sem usar nenhum atuador”, disse o professor Fumiya Iida. “Queremos simplificar a mão o máximo possível. Podemos obter muitas informações boas e um alto grau de controle sem nenhum atuador, de modo que, ao adicioná-los, obteremos um comportamento mais complexo em um pacote mais eficiente.”
Uma mão robótica totalmente acionada, além da quantidade de energia que requer, também é um problema de controle complexo. O design passivo da mão projetada por Cambridge, usando um pequeno número de sensores, é mais fácil de controlar, oferece uma ampla gama de movimentos e agiliza o processo de aprendizado.
No futuro, o sistema pode ser expandido de várias maneiras, como adicionando recursos de visão computacional ou ensinando o robô a explorar seu ambiente, o que permitiria que ele preendesse uma gama maior de objetos.
Acesse o artigo científico completo (em inglês).
Acesse a notícia completa na página da Universidade de Cambridge (em inglês).
Fonte: Sarah Collins, Universidade de Cambridge. Imagem: Laboratório de Robótica Bioinspirada, Universidade de Cambridge. Vídeo: Universidade de Cambridge.
Em suas publicações, o Portal Tech4Health da Rede T4H tem o único objetivo de divulgação científica, tecnológica ou de informações comerciais para disseminar conhecimento. Nenhuma publicação do Portal Tech4Health tem o objetivo de aconselhamento, diagnóstico, tratamento médico ou de substituição de qualquer profissional da área da saúde. Consulte sempre um profissional de saúde qualificado para a devida orientação, medicação ou tratamento, que seja compatível com suas necessidades específicas.
Os comentários constituem um espaço importante para a livre manifestação dos usuários, desde que cadastrados no Portal Tech4Health e que respeitem os Termos e Condições de Uso. Portanto, cada comentário é de responsabilidade exclusiva do usuário que o assina, não representando a opinião do Portal Tech4Health, que pode retirar, sem prévio aviso, comentários postados que não estejam de acordo com estas regras.
Leia também
Warning: foreach() argument must be of type array|object, null given in /home/u393669806/domains/t4h.com.br/public_html/wp-content/plugins/k-elements/functions/after-setup-theme.php on line 55
Warning: foreach() argument must be of type array|object, null given in /home/u393669806/domains/t4h.com.br/public_html/wp-content/plugins/k-elements/functions/after-setup-theme.php on line 55

Warning: foreach() argument must be of type array|object, null given in /home/u393669806/domains/t4h.com.br/public_html/wp-content/plugins/k-elements/functions/after-setup-theme.php on line 55
Warning: foreach() argument must be of type array|object, null given in /home/u393669806/domains/t4h.com.br/public_html/wp-content/plugins/k-elements/functions/after-setup-theme.php on line 55
Warning: foreach() argument must be of type array|object, null given in /home/u393669806/domains/t4h.com.br/public_html/wp-content/plugins/k-elements/functions/after-setup-theme.php on line 55
Warning: foreach() argument must be of type array|object, null given in /home/u393669806/domains/t4h.com.br/public_html/wp-content/plugins/k-elements/functions/after-setup-theme.php on line 55
Warning: foreach() argument must be of type array|object, null given in /home/u393669806/domains/t4h.com.br/public_html/wp-content/plugins/k-elements/functions/after-setup-theme.php on line 55
Warning: foreach() argument must be of type array|object, null given in /home/u393669806/domains/t4h.com.br/public_html/wp-content/plugins/k-elements/functions/after-setup-theme.php on line 55

Warning: foreach() argument must be of type array|object, null given in /home/u393669806/domains/t4h.com.br/public_html/wp-content/plugins/k-elements/functions/after-setup-theme.php on line 55
Warning: foreach() argument must be of type array|object, null given in /home/u393669806/domains/t4h.com.br/public_html/wp-content/plugins/k-elements/functions/after-setup-theme.php on line 55
Warning: foreach() argument must be of type array|object, null given in /home/u393669806/domains/t4h.com.br/public_html/wp-content/plugins/k-elements/functions/after-setup-theme.php on line 55
Warning: foreach() argument must be of type array|object, null given in /home/u393669806/domains/t4h.com.br/public_html/wp-content/plugins/k-elements/functions/after-setup-theme.php on line 55

Warning: foreach() argument must be of type array|object, null given in /home/u393669806/domains/t4h.com.br/public_html/wp-content/plugins/k-elements/functions/after-setup-theme.php on line 55
Warning: foreach() argument must be of type array|object, null given in /home/u393669806/domains/t4h.com.br/public_html/wp-content/plugins/k-elements/functions/after-setup-theme.php on line 55

Warning: foreach() argument must be of type array|object, null given in /home/u393669806/domains/t4h.com.br/public_html/wp-content/plugins/k-elements/functions/after-setup-theme.php on line 55
Warning: foreach() argument must be of type array|object, null given in /home/u393669806/domains/t4h.com.br/public_html/wp-content/plugins/k-elements/functions/after-setup-theme.php on line 55

Apenas usuários cadastrados no Portal tech4health t4h podem comentar, Cadastre-se! Por favor, faça Login para comentar